Marine Engineering
Developed using Qt 5.15.2 for Ubuntu, the application runs on a Jetson Nano computer module, which is seamlessly integrated into a custom PCB.
Hardware & System Architecture
- ✅ Custom PCB Integration: Equipped with a compass, GPS module, GPIO, and Ethernet port for seamless communication with an FPGA
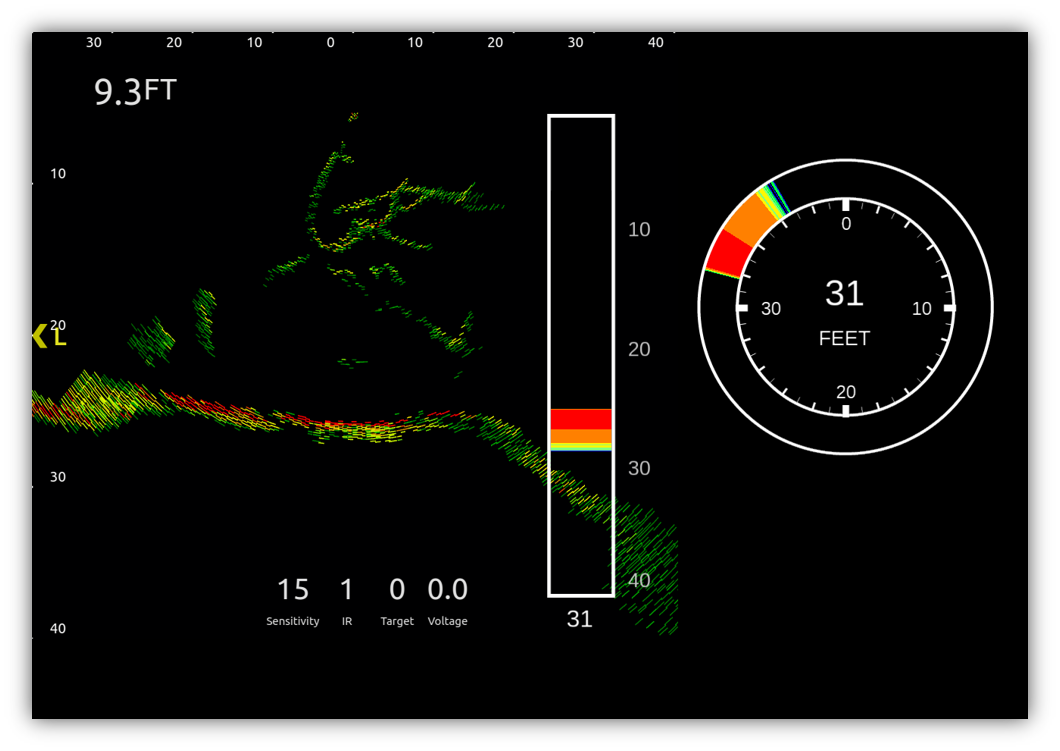
- ✅ Sonar Data Processing: The sonar sensor is connected to the FPGA, which transmits data via UDP protocol for real-time sonar imaging
- ✅ Optimized Display: Designed for a 1280x800 resolution display, ensuring clear and precise underwater visualization
- ✅ GPS & Navigation: Integrated with Garmin’s Navionics library for enhanced GPS functionality
By leveraging high-performance embedded computing and advanced sonar technology, MarCum enhances the fishing experience with precise, real-time underwater imaging for ice fishing, trolling, and boat fishing applications
Back to Projects